專利地圖及專題文章:AI專利技術解析-人工智慧果實成熟度辨識系統

 31183
31183
來源: Rex Wang 2024-06-11
AI專利技術解析-人工智慧果實成熟度辨識系統
新型名稱:人工智慧果實成熟度辨識系統
申請日:111(2022)/12/23
申請人: 台灣多立材料有限公司(TW)
新型專利第M639527號
一、 辨識水果
按,水果通常在生理上成熟時被採收,果實成熟期間的色澤要「變化」好幾次,也就是說它們成熟時的顏色, 就是最直觀的一種判斷標準,這也是很多種植戶最常採用的一種方式,例如有些果實成熟後為黃色,有的則為紅色。果實採收時間不當,直接影響果實的產量、品質,和耐儲性的一個關鍵因素。
因此,能正確判斷果實成熟度,適時採收,是獲得高產優質果實的一個關鍵性問題。為了能適時採收果實,影像處理已有許多應用的案例,在現今農業人力不足的情況下,若能將相關技術應用於農業管理,可能達到降低生產成本,減少人力的效果。
二、 AI專利之軟硬體架構
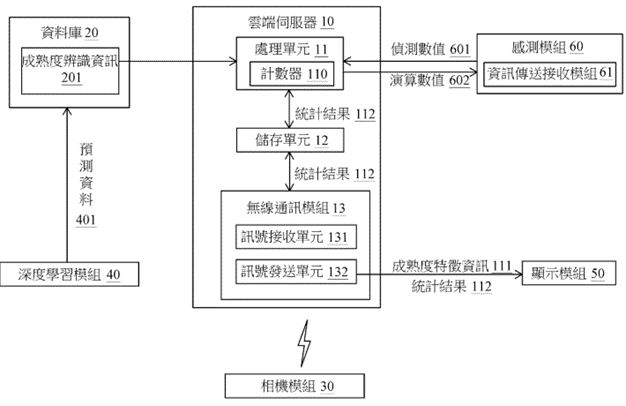
本新型係為一種人工智慧果實成熟度辨識系統1,如底下圖示,包括一雲端伺服器10、一資料庫20、複數個相機模組30、一深度學習模組40及一顯示模組50;其中,該雲端伺服器10具有一處理單元11及-儲存單元1,2,該處理單元11電性連接該儲存單元12;及該資料庫20與該雲端伺服器10通訊連接,用以儲存該些果實的複數成熟度辨識資訊201。
 工智慧果實成熟度辨識系統架構圖
其次,該些相機模組30與該雲端伺服器10通訊連接,該些相機模組30在一設定時間內擷取一場域內的複數個果實影像301,將該些果實影像301傳送至該處理單元11,透過該處理單元11讀取該些果實影像301,並與該資料庫20的該些成熟度辨識資訊201進行一分析演算以產生一成熟度特徵資訊111,再將該些果實影像301及該成熟度特徵資訊111儲存於該儲存單元12。再者,該深度學習模組40耦接於該些相機模組30,該深度學習模組40完成訓練後,根據該些果實影像301來辨識該些果實的成熟度,以生成一果實成熟度的預測資料401,並將該預測資料401儲存於該資料庫20中。
此外,該顯示模組50與該雲端伺服器10電性連接,可顯示該些果實的該成熟度特徵資訊111,該成熟度特徵資訊111包括判斷該些果實是一青果、一待熟果實或一成熟果實;其中,該青果為該果實的表面為綠色,該待熟果實為該果實的表面為一半綠色一半紅色,以及該成熟果實的表面為百分之八十為紅色。該成熟度辨識資訊201包括該些果實的一第一顏色特徵資訊及一第一形狀特徵資訊;以及該預測資料401包括該些果實在該場域內訓練後一第二顏色特徵資訊、一第二形狀特徵資訊及一密集度特徵資訊。
工智慧果實成熟度辨識系統架構圖
其次,該些相機模組30與該雲端伺服器10通訊連接,該些相機模組30在一設定時間內擷取一場域內的複數個果實影像301,將該些果實影像301傳送至該處理單元11,透過該處理單元11讀取該些果實影像301,並與該資料庫20的該些成熟度辨識資訊201進行一分析演算以產生一成熟度特徵資訊111,再將該些果實影像301及該成熟度特徵資訊111儲存於該儲存單元12。再者,該深度學習模組40耦接於該些相機模組30,該深度學習模組40完成訓練後,根據該些果實影像301來辨識該些果實的成熟度,以生成一果實成熟度的預測資料401,並將該預測資料401儲存於該資料庫20中。
此外,該顯示模組50與該雲端伺服器10電性連接,可顯示該些果實的該成熟度特徵資訊111,該成熟度特徵資訊111包括判斷該些果實是一青果、一待熟果實或一成熟果實;其中,該青果為該果實的表面為綠色,該待熟果實為該果實的表面為一半綠色一半紅色,以及該成熟果實的表面為百分之八十為紅色。該成熟度辨識資訊201包括該些果實的一第一顏色特徵資訊及一第一形狀特徵資訊;以及該預測資料401包括該些果實在該場域內訓練後一第二顏色特徵資訊、一第二形狀特徵資訊及一密集度特徵資訊。
三、 本新型之人工智慧果實成熟度辨識系統的使用方式
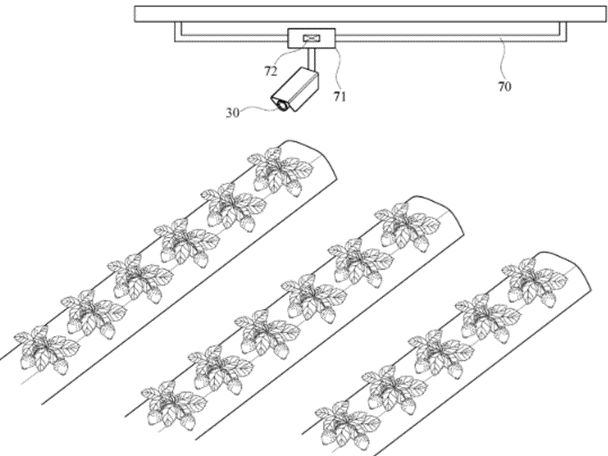
如底下圖示,本新型實施例係更包括一鋼線軌道70,每一相機模組30透過一滑動座71設置於該鋼線軌道70上,藉由一設置於該滑動座71上的一驅動器72以驅動每一相機模組30相對該鋼線軌道70移動,於該設定時間內擷取該場域內的該些果實影像301。
 使用相機模組來擷取果實影像之示意圖
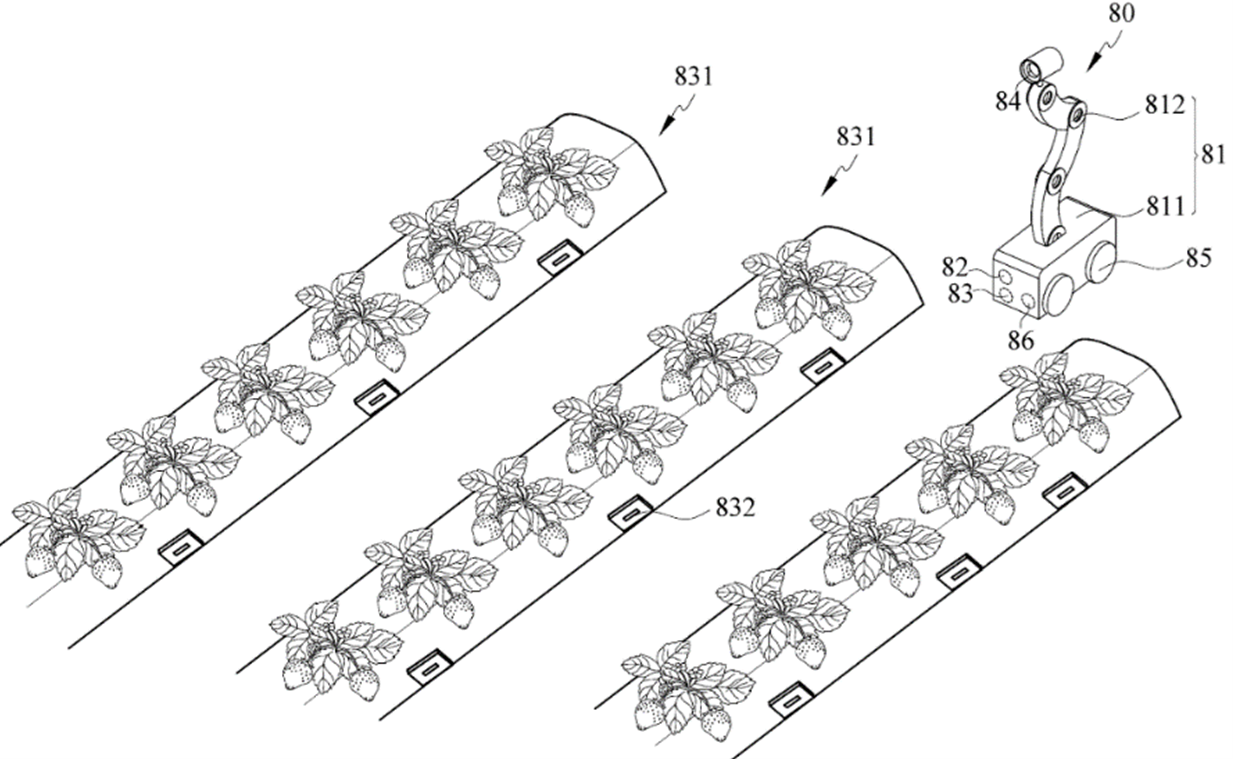
如底下圖示,本新型實施例係更包括一機器人80,該機器人80包括一外殼81、一控制模組82、一識別模組83、一攝像模組84、一動力模組85及一蓄電模組86;其中,該外殼81包括一車體811及三旋轉臂812,該三旋轉臂812可調整高度,適合用於採收不同高度的果實,該三旋轉臂812的長度可依據使用者的需要而任意變化,該三旋轉臂812中任一旋轉臂的長度可約為60公分適用於草莓園。
該控制模組82設置於該外殼81內部;該識別模組83設置於該外殼81上與該控制模組82電性連接,並與設置於一人行步道831上的複數個識別標籤832通訊連接,該些識別標籤832內存放一地點GPS座標,且該識別模組83可讀取該些識別標籤832內資訊;該攝像模組84設置於該外殼81上並與該控制模組82電性連接,該攝像模組84位於該三旋轉臂812的上方可進行左右旋轉,擷取該場域內的該些果實影像301,將該些果實影像301傳送至該處理單元11;該動力模組85設置於該外殼81底部並與該控制模組82電性連接,藉該動力模組85驅動設置於該外殼81底部的複數傳動軸輪子,使移動式該機器人80進行前進移動,藉由輪子差即可轉彎;以及該蓄電模組86與該動力模組85電性連接,且能提供電力予該動力模組85。
使用相機模組來擷取果實影像之示意圖
如底下圖示,本新型實施例係更包括一機器人80,該機器人80包括一外殼81、一控制模組82、一識別模組83、一攝像模組84、一動力模組85及一蓄電模組86;其中,該外殼81包括一車體811及三旋轉臂812,該三旋轉臂812可調整高度,適合用於採收不同高度的果實,該三旋轉臂812的長度可依據使用者的需要而任意變化,該三旋轉臂812中任一旋轉臂的長度可約為60公分適用於草莓園。
該控制模組82設置於該外殼81內部;該識別模組83設置於該外殼81上與該控制模組82電性連接,並與設置於一人行步道831上的複數個識別標籤832通訊連接,該些識別標籤832內存放一地點GPS座標,且該識別模組83可讀取該些識別標籤832內資訊;該攝像模組84設置於該外殼81上並與該控制模組82電性連接,該攝像模組84位於該三旋轉臂812的上方可進行左右旋轉,擷取該場域內的該些果實影像301,將該些果實影像301傳送至該處理單元11;該動力模組85設置於該外殼81底部並與該控制模組82電性連接,藉該動力模組85驅動設置於該外殼81底部的複數傳動軸輪子,使移動式該機器人80進行前進移動,藉由輪子差即可轉彎;以及該蓄電模組86與該動力模組85電性連接,且能提供電力予該動力模組85。
 使用機器人來擷取果實影像之示意圖
如底下圖示,本新型實施例係更包括一空拍機90包括一飛行器本體91、一控制器92及一攝像裝置93;其中,該飛行器本體91可受一遙控訊號而於空中改變飛行方向及高度之飛行裝置;該控制器92設置於該飛行器本體91內部;以及該攝像裝置93固定於該飛行器本體91的一側,與該控制器92電性連接,擷取該場域內的該些果實影像301,將該些果實影像301傳送至該處理單元11。
使用機器人來擷取果實影像之示意圖
如底下圖示,本新型實施例係更包括一空拍機90包括一飛行器本體91、一控制器92及一攝像裝置93;其中,該飛行器本體91可受一遙控訊號而於空中改變飛行方向及高度之飛行裝置;該控制器92設置於該飛行器本體91內部;以及該攝像裝置93固定於該飛行器本體91的一側,與該控制器92電性連接,擷取該場域內的該些果實影像301,將該些果實影像301傳送至該處理單元11。
四、結論
綜上所述,本新型提供一種人工智慧果實成熟度辨識系統,利用相機模組日夜拍攝果實成熟度,藉由深度學習模組學習精準判斷不同果實的成熟度,通知使用者可採收的區塊,相對習知需要大量人力檢查巡邏,本新型同時可配合無人機、鋼線軌道機器或定點攝像機,如此適應於不同的環境來節省人力資源。
若有企業先進或創業家欲對本專題或創新議題或相關專利內容想要進一步瞭解者,或對某產業技術進行FTO、專利地圖分析、專利檢索、專利申請及各專利舉發及迴避設計分析,敬請隨時歡迎電洽:中銓國際專利商標事務所熱線:04-23823629,將派專人提供服務。
資料來源: 中華民國專利資訊檢索系統
關鍵字: 人工智慧、AI、人工智能、專利、水果、成熟度辨識
新型名稱:人工智慧果實成熟度辨識系統
申請日:111(2022)/12/23
申請人: 台灣多立材料有限公司(TW)
新型專利第M639527號
一、 辨識水果
按,水果通常在生理上成熟時被採收,果實成熟期間的色澤要「變化」好幾次,也就是說它們成熟時的顏色, 就是最直觀的一種判斷標準,這也是很多種植戶最常採用的一種方式,例如有些果實成熟後為黃色,有的則為紅色。果實採收時間不當,直接影響果實的產量、品質,和耐儲性的一個關鍵因素。
因此,能正確判斷果實成熟度,適時採收,是獲得高產優質果實的一個關鍵性問題。為了能適時採收果實,影像處理已有許多應用的案例,在現今農業人力不足的情況下,若能將相關技術應用於農業管理,可能達到降低生產成本,減少人力的效果。
二、 AI專利之軟硬體架構
本新型係為一種人工智慧果實成熟度辨識系統1,如底下圖示,包括一雲端伺服器10、一資料庫20、複數個相機模組30、一深度學習模組40及一顯示模組50;其中,該雲端伺服器10具有一處理單元11及-儲存單元1,2,該處理單元11電性連接該儲存單元12;及該資料庫20與該雲端伺服器10通訊連接,用以儲存該些果實的複數成熟度辨識資訊201。
工智慧果實成熟度辨識系統架構圖
其次,該些相機模組30與該雲端伺服器10通訊連接,該些相機模組30在一設定時間內擷取一場域內的複數個果實影像301,將該些果實影像301傳送至該處理單元11,透過該處理單元11讀取該些果實影像301,並與該資料庫20的該些成熟度辨識資訊201進行一分析演算以產生一成熟度特徵資訊111,再將該些果實影像301及該成熟度特徵資訊111儲存於該儲存單元12。再者,該深度學習模組40耦接於該些相機模組30,該深度學習模組40完成訓練後,根據該些果實影像301來辨識該些果實的成熟度,以生成一果實成熟度的預測資料401,並將該預測資料401儲存於該資料庫20中。
此外,該顯示模組50與該雲端伺服器10電性連接,可顯示該些果實的該成熟度特徵資訊111,該成熟度特徵資訊111包括判斷該些果實是一青果、一待熟果實或一成熟果實;其中,該青果為該果實的表面為綠色,該待熟果實為該果實的表面為一半綠色一半紅色,以及該成熟果實的表面為百分之八十為紅色。該成熟度辨識資訊201包括該些果實的一第一顏色特徵資訊及一第一形狀特徵資訊;以及該預測資料401包括該些果實在該場域內訓練後一第二顏色特徵資訊、一第二形狀特徵資訊及一密集度特徵資訊。
三、 本新型之人工智慧果實成熟度辨識系統的使用方式
如底下圖示,本新型實施例係更包括一鋼線軌道70,每一相機模組30透過一滑動座71設置於該鋼線軌道70上,藉由一設置於該滑動座71上的一驅動器72以驅動每一相機模組30相對該鋼線軌道70移動,於該設定時間內擷取該場域內的該些果實影像301。
使用相機模組來擷取果實影像之示意圖
如底下圖示,本新型實施例係更包括一機器人80,該機器人80包括一外殼81、一控制模組82、一識別模組83、一攝像模組84、一動力模組85及一蓄電模組86;其中,該外殼81包括一車體811及三旋轉臂812,該三旋轉臂812可調整高度,適合用於採收不同高度的果實,該三旋轉臂812的長度可依據使用者的需要而任意變化,該三旋轉臂812中任一旋轉臂的長度可約為60公分適用於草莓園。
該控制模組82設置於該外殼81內部;該識別模組83設置於該外殼81上與該控制模組82電性連接,並與設置於一人行步道831上的複數個識別標籤832通訊連接,該些識別標籤832內存放一地點GPS座標,且該識別模組83可讀取該些識別標籤832內資訊;該攝像模組84設置於該外殼81上並與該控制模組82電性連接,該攝像模組84位於該三旋轉臂812的上方可進行左右旋轉,擷取該場域內的該些果實影像301,將該些果實影像301傳送至該處理單元11;該動力模組85設置於該外殼81底部並與該控制模組82電性連接,藉該動力模組85驅動設置於該外殼81底部的複數傳動軸輪子,使移動式該機器人80進行前進移動,藉由輪子差即可轉彎;以及該蓄電模組86與該動力模組85電性連接,且能提供電力予該動力模組85。
使用機器人來擷取果實影像之示意圖
如底下圖示,本新型實施例係更包括一空拍機90包括一飛行器本體91、一控制器92及一攝像裝置93;其中,該飛行器本體91可受一遙控訊號而於空中改變飛行方向及高度之飛行裝置;該控制器92設置於該飛行器本體91內部;以及該攝像裝置93固定於該飛行器本體91的一側,與該控制器92電性連接,擷取該場域內的該些果實影像301,將該些果實影像301傳送至該處理單元11。
四、結論
綜上所述,本新型提供一種人工智慧果實成熟度辨識系統,利用相機模組日夜拍攝果實成熟度,藉由深度學習模組學習精準判斷不同果實的成熟度,通知使用者可採收的區塊,相對習知需要大量人力檢查巡邏,本新型同時可配合無人機、鋼線軌道機器或定點攝像機,如此適應於不同的環境來節省人力資源。
若有企業先進或創業家欲對本專題或創新議題或相關專利內容想要進一步瞭解者,或對某產業技術進行FTO、專利地圖分析、專利檢索、專利申請及各專利舉發及迴避設計分析,敬請隨時歡迎電洽:中銓國際專利商標事務所熱線:04-23823629,將派專人提供服務。
資料來源: 中華民國專利資訊檢索系統
關鍵字: 人工智慧、AI、人工智能、專利、水果、成熟度辨識
關鍵字:#人工智慧 #AI #人工智能 #專利 #水果 #辨識